分布式训练topic由以下几部分组成:
1、 朴素的模型并行
1.1 简介
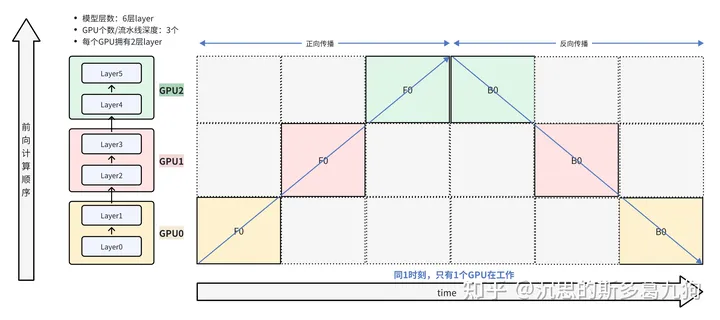
原理:假设有K个GPU,把一个L层的模型切分成K份,每个GPU拥有模型层数是L/K层。
简介:如下图所示,类似串行的思想。
数据先依次在GPU0 –> GPU1 –> GPU2 上进行forward前向计算,然后依次在GPU2 –> GPU1 –> GPU0 上进行backward反向计算。
问题:
- 计算效率:GPU利用率低,同一时刻只有一个GPU被利用,其余GPU处于空闲状态(图中灰色的格子,又称气泡bubble)。
- 显存效率:显存占用高,每一个GPU需要保存完整的输入激活值显存占用。
1.2 代码实现
上图的代码实现
import torchimport torch.nn as nnimport torch.optim as optim
class NaiveParallelModel(nn.Module):
def __init__(self):
super(NaiveParallelModel, self).__init__()
hidden_size=10
# 一共有6个layer
self.net0 = nn.Linear(hidden_size,hidden_size)
self.net1 = nn.Linear(hidden_size, hidden_size)
self.net2 = nn.Linear(hidden_size, hidden_size)
self.net3 = nn.Linear(hidden_size, hidden_size)
self.net4 = nn.Linear(hidden_size, hidden_size)
self.net5 = nn.Linear(hidden_size, hidden_size)
self.relu = nn.ReLU()
#每个GPU拥有2个layer
self.seq0 = nn.Sequential(self.net0, self.relu, self.net1,self.relu ).to(“cuda:0”)
self.seq1 = nn.Sequential(self.net2, self.relu, self.net3, self.relu).to(“cuda:1”)
self.seq2 = nn.Sequential(self.net4, self.relu, self.net5).to(“cuda:2”)
def forward(self,x):
#串行的方式,同一时刻只有一个GPU被利用
x = self.seq2(self.seq1(self.seq0(x).to(“cuda:1”)).to(“cuda:2”))
return x
def train_naive_PP():
batch_size = 16
hidden_size = 10
model = NaiveParallelModel()
inputs = torch.randn(batch_size,hidden_size).to(“cuda:0”)
labels = torch.randn(batch_size,hidden_size).to(“cuda:2”)
loss_fn = nn.MSELoss()
optimizer = optim.SGD(model.parameters(), lr=1e-3)
optimizer.zero_grad()
outputs = model(inputs)
loss= loss_fn(outputs,labels)
loss.backward()
optimizer.step()
if __name__ == ‘__main__’:
train_naive_PP()
train_pp()
2、GPipe
论文:
GPipe: Efficient Training of Giant Neural Networks using Pipeline Parallelism 2018 google
torchgpipe: On-the-fly Pipeline Parallelism for Training Giant Models 2020
目标:解决朴素模型并行的资源浪费问题,减少空闲气泡大小bubble。
解决办法:引入数据并行思想,对数据进行切分,把1个小批量(mini-batch)切成M个微批量(micro-batch),每一次在1个微批量micro-batch上进行计算。(梯度累积的思想)
- Lingvo框架:基于TensorFlow的实现。
- torchpipe:基于Torch的复现。
2.1 简介
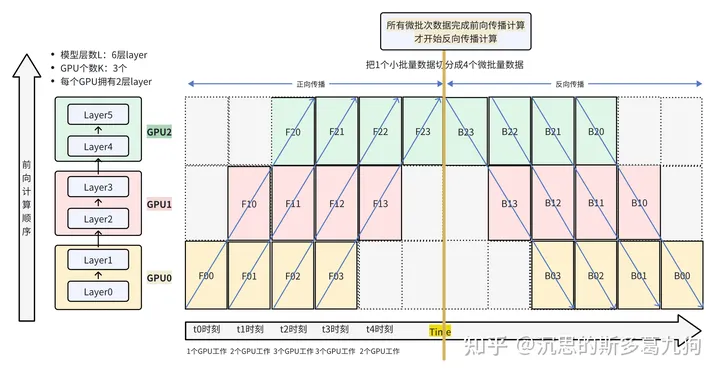
如下图所示。
(1)数据拆分:将1个batch的数据,拆分为4个微批次: FX0/FX1/FX2/FX3
(2)前向计算:对4个微批次数据依次进行前向计算。
-
第0个微批次数据 FX0 先依次在GPU0 –> GPU1 –> GPU2 上进行forward前向计算
- F00 / GPU0 –> F10 / GPU1 –> F20 / GPU2
- 第1个微批次数据 FX1 重复上述 前向计算
- 第2个微批次数据 FX2 重复上述 前向计算
- 第3个微批次数据 FX3 重复上述 前向计算
(3)反向计算:待4个微批次数据全部完成前向计算(梯度一直在微批次中累积),才开始反向计算。
-
第3个微批次数据 FX3 先依次在GPU2 –> GPU1 –> GPU0 上进行backward反向计算
- F23 / GPU2 –> F13 / GPU1 –> F03 / GPU2
- 第2个微批次数据 FX2 重复上述 反向计算
- 第1个微批次数据 FX1 重复上述 反向计算
- 第0个微批次数据 FX0 重复上述 反向计算
2.2 空闲气泡bubble计算
符号说明:与paper保持一致。
- L:模型的层数 ,eg:L=6
- K:GPU个数/流水线深度p,eg:K=3
- L/K:每个GPU的层数, eg: L/K=2
- N:mini batch size,模型输入数据个数(bs),小批量的数据个数 , eg:N=16
- M:切的块数,微批次的数量, eg: M=4
- N/M:micro batch size,微批量下模式下的模型输入数据个数, eg: N/M=4
计算逻辑如下:
- 长度:2*(M+K-1)
- 宽度:K
- 总体面积:K*2*(M+K-1)
- 利用的GPU面积:(2*M*K)
- 利用的GPU占比: (2*M*K)/(K*2*(M+K-1))
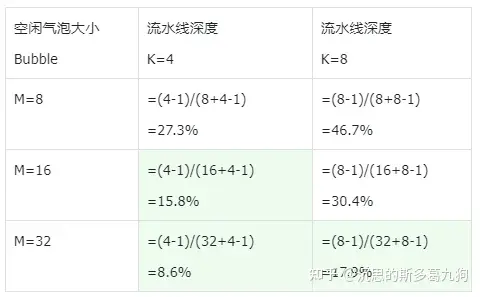
- 空闲的GPU占比(bubble):1- 2*M*K/K*2*(M+K-1) = 1-M/(M+K-1) = (K-1)/(M+K-1)
结论:
- M(micro-batch)越大,同一时刻满负荷运行的GPU个数越多,空闲的气泡bubble越少。
- 当 M≥ 4*K 时,气泡大小可忽略不计。
2.3 中间激活值显存占用
2.3.1 没有重计算
简介:每个块都保留完整的输入数据。
- L:模型的层数 ,eg:L=6
- K:GPU个数/流水线深度,eg:K=3
- L/K:每个GPU的层数, eg: L/K=2
- N:mini batch size,模型输入数据个数(bs),小批量的数据个数 , eg:N=16
- M:切的块数,微批量块,指令长度, eg: M=4
- N/M:micro batch size,微批量下模式下的模型输入数据个数, eg: N/M=4
每个GPU中间激活值显存:每个GPU的层数 * 数据个数 = ()O(LK∗N) eg: O(2*N)
2.3.2 引入重计算
核心思路:删掉中间变量的激活值占用
简介:每个块只保留一份中间值(边界层的中间值)。同时,保留一份完整的输入数据(在反向传播时,用于重计算所需的中间变量)。
- 微批量的中间值: O(LK∗NM) eg: 0.5*N
- 模型输入数据个数:N
每个GPU中间激活值显存: O(N+LK∗NM) , eg:O(1.5*N)
2.4 怎么切
Gpipe就是依据算力对图进行了分割,从而把不同层分配到不同的GPU。
Megatron-LM的切法:直接按照层数切分。
- ParallelTransformer一共有6个ParallelTransformerLayer,
- 流水行深度/GPU个数=3
- 每个GPU拥有的ParallelTransformerLayer个数:num_layers=6//3=2
#megatron/model/transformer.pydef _get_num_layers(args, model_type, is_decoder=False):
…
num_layers = args.num_layers // args.transformer_pipeline_model_parallel_size
…
return num_layers
2.5 代码实现
上图中的代码实现:
class ParallelModel(nn.Module):
def __init__(self,split_size):
super(ParallelModel, self).__init__()
hidden_size=10
# 一共有6个layer
self.net0 = nn.Linear(hidden_size,hidden_size)
self.net1 = nn.Linear(hidden_size, hidden_size)
self.net2 = nn.Linear(hidden_size, hidden_size)
self.net3 = nn.Linear(hidden_size, hidden_size)
self.net4 = nn.Linear(hidden_size, hidden_size)
self.net5 = nn.Linear(hidden_size, hidden_size)
self.relu = nn.ReLU()
# 每个GPU拥有2个layer
self.seq0 = nn.Sequential(self.net0, self.relu, self.net1,self.relu ).to(“cuda:0”)
self.seq1 = nn.Sequential(self.net2, self.relu, self.net3, self.relu).to(“cuda:1”)
self.seq2 = nn.Sequential(self.net4, self.relu, self.net5).to(“cuda:2”)
self.split_size=split_size
def forward(self,x):
#将将1个batch的数据,拆分为split_size个微批次数据
splits = iter(x.split(self.split_size, dim=0))
s_next = next(splits)
# 第一个微批次起点
s_prev = self.seq0(s_next).to(“cuda:1”)
ret =[]
for s_next in splits:
s_prev = self.seq1(s_prev).to(“cuda:2”)
s_prev = self.seq2(s_prev)
ret.append(s_prev)
#下一个微批次起点
s_prev=self.seq0(s_next).to(“cuda:1”)
#最后一个微批次
s_prev = self.seq1(s_prev).to(“cuda:2”)
s_prev = self.seq2(s_prev)
ret.append(s_prev)
return torch.cat(ret)
def train_naive_PP():
batch_size = 16
hidden_size = 10
model = NaiveParallelModel()
inputs = torch.randn(batch_size,hidden_size).to(“cuda:0”)
labels = torch.randn(batch_size,hidden_size).to(“cuda:2”)
loss_fn = nn.MSELoss()
optimizer = optim.SGD(model.parameters(), lr=1e-3)
optimizer.zero_grad()
outputs = model(inputs)
loss= loss_fn(outputs,labels)
loss.backward()
optimizer.step()
if __name__ == ‘__main__’:
train_pp()
3、PipeDream
论文:PipeDream :Memory-Efficient Pipeline-Parallel DNN Training 2020 微软
问题:Gpipe流水线其存在两个问题:GPU利用率低(bubble气泡),显存占用大。
Gpipe显存占用分析:所有微批次完成前向传播计算,才开始反向传播计算。每个GPU需要缓存M份中间激活值。
目标:需要每个微批次数据尽可能早的完成反向传播计算,从而使得对应的中间激活值可以提前释放。
解决方案: 1F1B策略。
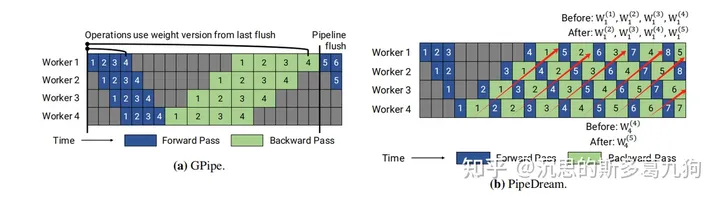
3.1 1F1B策略
简介:One Forward pass followed by One Backward pass。1个微批次完成前向传播计算,就开始反向传播计算。
如上图b红色箭头所示,1个微批次数据在完成前向传播以后,立刻开始反向传播。这样子微批次数据对应的中间激活值就可以提前释放。
3.1.1 训练有效性问题
在这种1F1B训练模式下,前向传播和反向传播是相互交错的。每1个微批次数据反向传播后,模型参数会更新,若干个微批次数据进行反向传播后,会带来多个版本权重参数,也就容易出现同一个批次数据采用不同版本的模型权重参数。
问题1:同一个微批次数据,相同的device(相同stage),在前向计算和反向计算,采用不同版本的模型参数。
示例:
- Device 1 的微批次5数据,在前向传播使用了第1个版本模型(微批次1反向传播完成),
- Device 1 的微批次5数据,在反向传播使用了第4个版本模型(微批次1、2、3、4反向传播完成)

解决办法:Weight Stashing方法
每个device多备份几个不同版本的权重,确保同一个微批次数据,在前向计算和后向计算采用同一个版本的模型权重。计算前向传播之后,会将这份前向传播使用的权重保存下来,用于同一个 minibatch 的后向计算。
示例:
- Device 1 的 微批次5数据, 在前向传播使用了第1个版本模型(微批次1反向传播完成),
- Device 1 的 微批次5数据, 在反向传播使用了第1个版本模型(微批次1反向传播完成)
问题2:同一个微批次数据,相同的操作(都是前向或者都是反向),在不同的device上(不同stage),采用不同版本的模型参数。
示例:
- Device 1 的微批次5数据,在前向传播使用了第1个版本模型(微批次1反向传播完成)
- Device 2 的微批次5数据,在前向传播使用了第2个版本模型(微批次1、2反向传播完成)

解决方法:Vertical Sync 方法。
每个批次数据进入pipeline时都使用当前device(阶段)最新版本的参数,并且参数版本号会伴随该批次数据整个生命周期,从而实现了device(阶段)间的参数一致性。
示例:
- Device 1 的微批次5数据,在前向传播使用了第1个版本模型(微批次1反向传播完成)
- Device 2 的微批次5数据,在前向传播使用了第1个版本模型(微批次1反向传播完成)
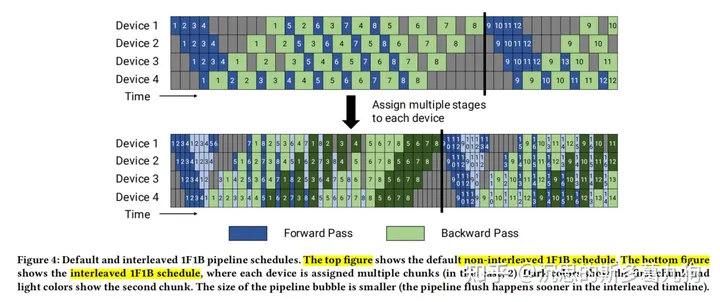
3.1.2 非交错式 schedule
源码:megatron/core/pipeline_parallel/schedules.py
调度模式:
1F1B有两种调度模式:
(1)非交错式 schedule:默认的模式,如下图中的top figure。
Megatron-LM:forward_backward_pipelining_without_interleaving方法
(2)交错式 schedule:如下图中的bottom figure。
Megatron-LM:forward_backward_pipelining_with_interleaving方法
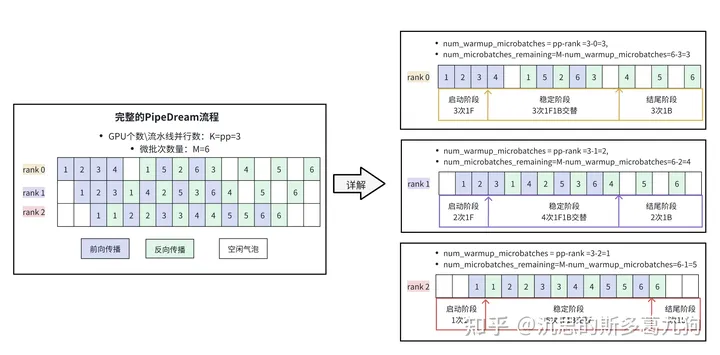
非交错式 schedule 可分为三个阶段:
第一阶段:启动热身阶段。微批次的前向传播,直到完成第1个小批次的前向传播。
第二阶段:稳定阶段。交替执行后续微批次的前向传播和反向传播。
第三阶段:结尾阶段。微批次的反向传播,对应着启动热身阶段的前向传播。
如下图所示:












暂无评论内容